
Learn about Argo
What is a Profiling Float?
Profiling floats evolved from the ALACE float concept. ALACE floats were originally conceived by Doug Webb of Webb Research. The need for such a device followed the successes of the SOFAR and RAFOS float systems which, though they supplied enormously valuable data, were restricted to areas of the ocean with acoustic sound sources or listening devices available. The ALACE concept aimed to supply a float that operated autonomously and could operate anywhere (except in ice-infested waters). ALACE is an acronym standing for, Autonomous LAgrangian Current Explorer. Much subsequent development was completed cooperatively with Russ Davis' group at the Scripps Institute of Oceanography, particularly adding the "P" to turn an Alace into a P-Alace float - a Profiling ALACE float.
The Alace float is launched at sea, adjusts its buoyancy to sink to a preprogrammed depth where it remains for a preprogrammed period. It then readjusts its buoyancy, floats to the surface and is positioned by satellite.
Soon after Alace floats were first launched the idea naturally arose that the floats should be equipped with instrumentation to observe temperature on the way up, and then later salinity was added. A variety of sensors have been tried, at the present time most of the community that uses profiling Alace floats (or P-Alace floats) are using a device equipped with a Seabird CTD.
The instruments sample temperature and salinity in during the ascent phase of their cycle and transmit the data to a satellite run by Service Argos. The data stream includes messages describing the CTD profile, and position information allowing tracking at the surface.
The float completes its duty cycle by re-adjusting its buoyancy and sinking once again to its pre-programmed depth. The latest version of the P-Alace float produced by Webb Research is powered by alkaline batteries, and has power sufficient to execute about 200 profiles. This is a re-engineered version that has been given a new acronym, APEX, which is "Autonomous Profiling EXplorer". Another version is the PROVOR float, built by Metocean in Dartmouth, N.S. and Martec, in France.
More information about P-Alace floats, or APEX floats, can be obtained at the Webb Research web site.
Argo Data Process
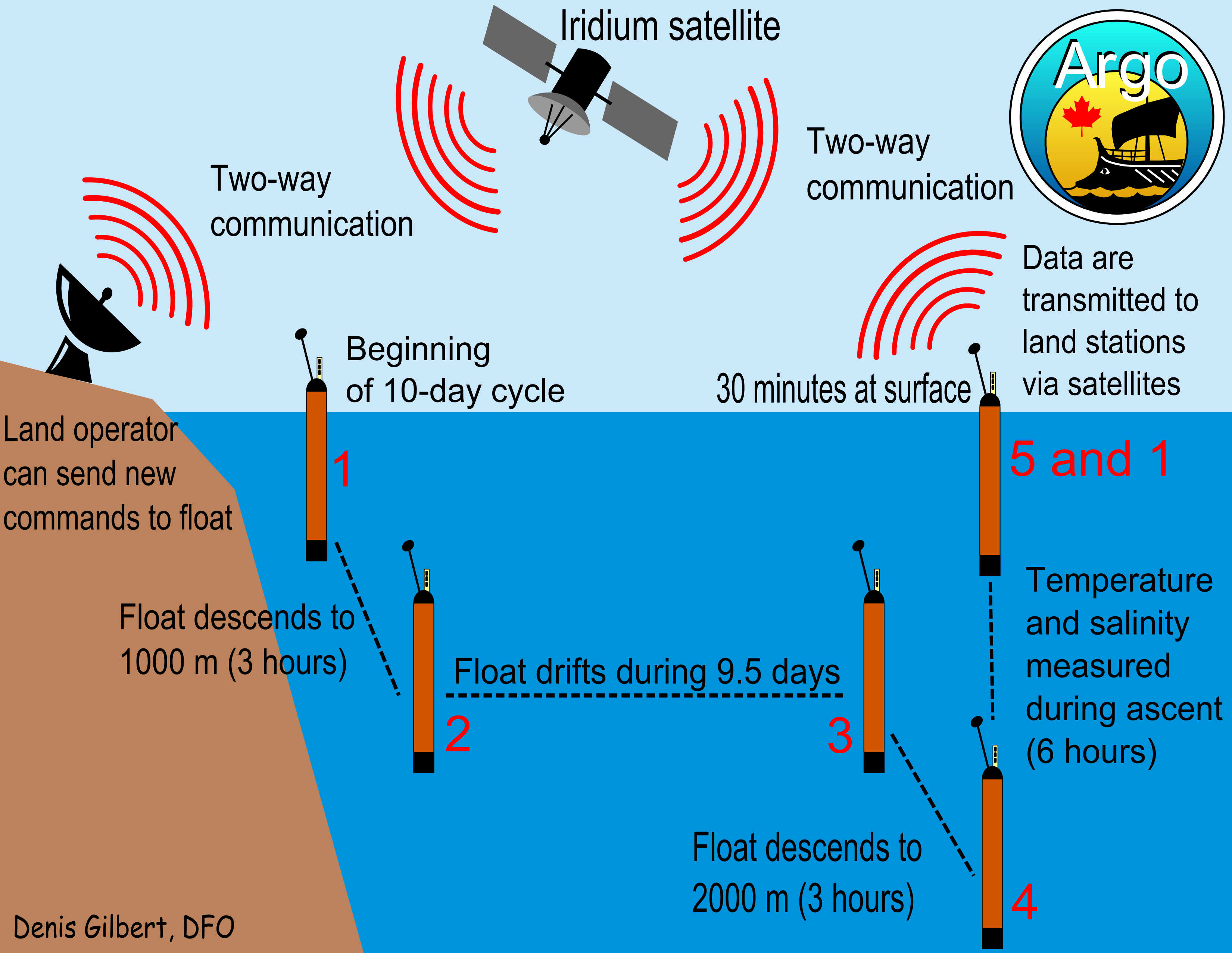
A typical 10-day cycle begins with an Argo float at the sea surface (1). Fluid is pumped from an external bladder to the interior of the float. This reduces the float's buoyancy, which allows it to sink to the pre-determined depth of 1000 m (2) where it freely drifts for the next 9.5 days (3). Additional pumping of fluid from the external bladder allows the float to further sink to 2000 m (4). Next, fluid from the inside of the float is pumped to its external bladder, causing the float to rise while collecting temperature and salinity data. Soon after the float reaches the surface (5), it sends its data to a satellite, which relays the data to a receiving land station. Once the float receives confirmation from the satellite that all data were well-received, it begins a new cycle (1).
Argo Float Deployment

Floats can be deployed anywhere in the global ocean, except for permanently ice-covered regions, to operate autonomously. At this time, profiling floats have been deployed successfully from research vessels and ships of opportunity and it is likely that air deployment will become feasible in the near future. (Click picture for larger image.)
- Floats can be deployed from C130 aircraft.
- Floats can be packaged for lowering over the side of a moving vessel.
- Floats can simply be lowered into the water.
- Floats can also be launched over the side of a vessel using a protective cover.
Argo Float Schematic

The various sensors of an Argo float are almost always located at the top of the float, where we also find the antenna that allows the exchange of data with satellites. A central processing unit (CPU) contains the float's software. A stability disk helps the float retain a nearly vertical position by damping wave motion at the sea surface. A battery-powered gear motor activates a piston, which allows the pumping of hydraulic fluid from the inside of the float to an external bladder, or vice-versa, allowing the float to either rise or sink. The protecting boot prevents damage to the float in the unlikely event that it would hit the sea floor.
- Date modified: